
Particularités du système d’aide au parking
Le calculateur comporte deux
voies reliées à la prise remorque. Si le véhicule est attelé à une remorque, la
fonction est automatiquement désinhibée.
Lorsque le véhicule n’est
pas équipé d’une prise remorque, ces deux voies sont shuntées.
Dans le cas d’un véhicule
équipé d’une boule de remorquage non démontable, il est possible de ramener la
distance minimum de détection de 30
cm à 50
cm en retirant le fusible prévu à cet effet.
Le calculateur est
autodiagnosticable.
Il est nécessaire de retirer
une résistance de codage puis d’activer le système (+APC et engagement de la
marche arrière).
Le bruiteur émet alors une
série de bips correspondants aux défauts mémorisés par le calculateur.
 1 Bruiteur
1 Bruiteur
2
Prise-remoque
3 Fusible
de « distance minimum »
4
Résistance de codage
5
Calculateur d’aide au parking
6 Capteurs
Le capteur ultrasonique
L'émetteur envoie un train d'ondes et ensuite le capteur passe en mode réception et attends le retour du signal.
·
Si un signal est de retour avant 20 mS, l'électronique du capteur détermine
le temps que le signal à mis pour faire l'aller-retour et donne la distance à
laquelle se situe l'objet détecté sous la forme d'un signal analogique du type
4-20 mA.
·
Si aucun signal ne revient après 20 mS, le capteur repasse en mode émission
et renvoie une salve d'ondes.
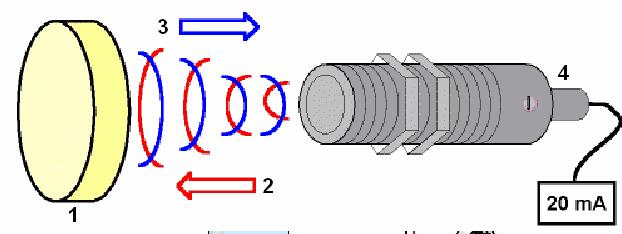
1 : Objet à détecté
2 : 1er temps
3 : 2ème temps
4
CapteurOn crée des ultrasons grâce à l'effet piézo-électrique. Certains matériaux dont le quartz ont la propriété de vibrer quand on leur applique une tension. Lorsque l'on alimente le détecteur, l'élément piézo-électrique se met à vibrer, ce qui a pour conséquence l'apparition d'une fréquence de l'ordre de 200 000 Hertz (200 KHertz). La vibration est transmisse à l'air ambiant grâce à la face avant du capteur qui est composé de céramique.
- Le capteur permet de détecter tout type de matériau sauf les objets absorbant les ondes sonores tel que la ouate, le feutre,...
- Le signal est transmis grâce à la présence de l'air, il faut donc éviter les courants d'air qui détourneraient le signal de leurs destinations.
- Aucun fonctionnement possible dans le vide.
- Le signal n'est pas influencé par la poussière et les environnements brumeux.
- Il y a une zone que l'on appelle "zone morte" et qui correspond à la distance minimum que doit avoir l'objet à détecter par rapport au capteur pour que celui-ci fonctionne correctement.
- Il faut éviter de détecter des objets dont l'angle d'inclinaison est trop grand car le signal risque de ne plus revenir, ce qui rendrait toute détection impossible.

Aucun commentaire:
Enregistrer un commentaire